
Motions of an Formula 1 car
A 3D body can be rotated in three or six degrees of freedom in three orthogonal axis. These six degrees of freedom are divided in three rotation motions and three translation motions. For bodies with only rotational freedom of motion, we can say that they have three degrees of freedom. For bodies with rotational and translational freedom of motion, we can say that they have six degrees of freedom. Because the movement and rotation along the three axis are independent of each other, such motion is said to have “six degrees of freedom.”
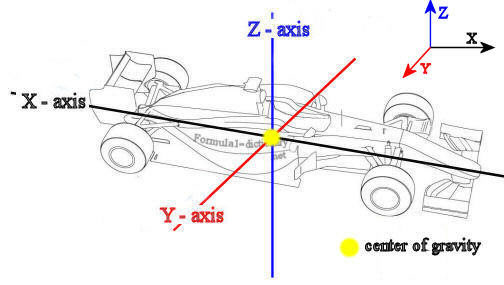
All rotations in 3D environment happened trough 3 axis of rotation, vertical, lateral or longitudinal axis.
Vertical axis, (Z – axis or yaw axis) is an axis drawn from top to bottom, passing trough the centre of gravity and perpendicular to the other two axes. Usually, but not always, is perpendicular to earth (track surface) too.
Lateral axis, (Y – axis, transverse axis or pitch axis) is an axis running from left to right, passing trough the center of gravity. The lateral axis passes through the car from side to side, and with car stationary, always is parallel to earth (track surface).
Longitudinal axis (X – axis or roll axis) is an axis drawn through the body of the vehicle from front to rear in the normal direction of movement, or the direction the driver faces, also passing trough the center of gravity and usually, but not always, is parallel to earth (track surface) too. Depend of the rake angle.
Important thing to notice there is that in ideal condition, all three axis’s are intersecting in one point, called center of gravity. That is theoretical, but in practice things are a bit different. It is very hard, almost impossible to achieve that. That’s why some teams complain that car is nose heavy, there is lot of understeer or oversteer. If one of the axes is out of CoG, that’s what happened.
Here we are talking about car movements, any racing car, especially Formula 1 car, but all this can be applied to normal cars, airplanes, ships, submarines and all systems movable in 3D space. Car doesn't seem to have up-down movement freedom (heave), but this is misconception. Ground clearance is changed all the time with suspensions work.
So, these movements will be referred to as:
Rotational motions:
1. Roll
2. Pitch
3. Yaw
Translational movement:
1. Heave
2. Surge
3. Sway
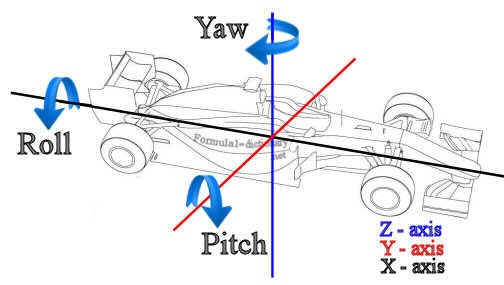
Roll
Roll is the side-to-side motion of a car about an axis that extends from the front to back of the vehicle, and passing trough the center of gravity, or we can say that roll is the rotation of a car about its longitudinal (front/back) X – axis. To better fight roll intensity, teams must calculate a roll center point. The roll centre is an imaginary, but accurately defined, point on the centre-line X - axis of the car around which the car rolls.
Roll is typically taken to be positive (+) for upward movement on the right side and negative (-) for upward movement on the left side of the car.
Rotation about this axis is sometimes also called bank.
Roll is happening in response to cornering centrifugal forces. Teams are fighting this movement with different antiroll devices like antiroll links, dampers or bars.
Pitch
Pitch is the front-and-rear motion of a car about an axis that extends from the left to right of a vehicle and trough the center of gravity, or transverse (side-to-side) Y - axis.
Pitch is typically taken to be positive (+) for upward movement of the vehicle nose and negative (-) for downward movement of the vehicle nose. The effects of pitch will increase as a function of vehicle altitude. Pitch is happening in response to acceleration and deceleration forces, and is hard to fight. You can gain some advantages with different suspension set-up. In last few years, and especially during 2013 season Mercedes AMG F1 team and Lotus F1 team manage to do it best with new FRIC suspension system.
Yaw
Yaw is the left to right motion of the nose of a car on its vertical Z - axis, an axis that runs from the top through the bottom of a vehicle and passing trough the center of gravity.
Yaw angle is taken to be positive (+) when the nose rotates toward right and negative (-) when the nose rotates to left. Yaw is happening in response to cornering but also in response to side wind. Teams can fight it with different suspension settings and aero work.
Just for the sake of clarity, we have considered roll, pitch and yaw independently, but in reality all three types of movements affect vehicle attitude at the same time.
Each rotation will always influence two axis. For example, the yaw rotation essentially performs a 2D rotation with respect to the X and Y axis while leaving the Z axis unchanged. With pitch rotation only Y axis remains unchanged, and roll will leave X axis unchanged.
The yaw, pitch, and roll rotations can be used to place a 3D body in any orientation.
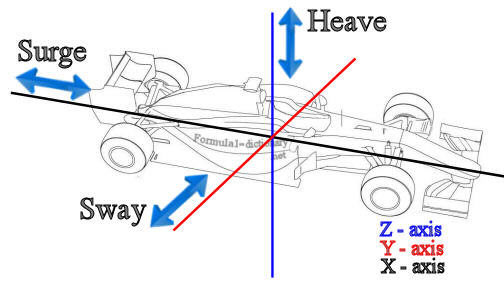
Translational movement is movement of the car parallel with one of the axis. Movement is linear and not rotational as in case of yaw, roll and pitch.
Heave
Heave is the linear vertical up/down motion of a vehicle in response to suspension action and reaction, parallel with Z - axis. Heave is happening in response to downforce, lift or bumps. Fighting the heave is very important because it always influence riding height, which is in turn extremely important for good downforce created by undertray and diffuser. You can gain a lot with different suspension settings, and again like Mercedes and Lotus with new FRIC suspension system.
Sway
Sway is the linear lateral side-to-side motion in response to centrifugal forces during the cornering or drifting, parallel with Y - axis. Only force causing sway on cars is centrifugal force. Good tires, good smooth delivery of power (torque curve) and suspension setup can improve car stability. Traction circle is also very important, but sometime you can’t fight physics. Strongs sway is hard on durability of the tires.
Surge
Surge is the linear longitudinal front to back motion in response to reversing, acceleration, deceleration and braking, parallel with X - axis. This term is really not in use in racing. Normally, expressions are acceleration, deceleration or braking. Teams really don’t fight against this.
There are some circumstances when two or more motions are combined, as is in case of drifting a car or trail braking. In this case, with constant speed, sway, roll and yaw are combined. When you trail brake for corner entry, surge, roll, pitch and yaw are combined (this type of motion is sometimes referred to as warp), with sway sometimes adding to misery of the engineers.
 All of these movements are precisely measured during the testing and race. There are a special electronic units, small compact motion sensor which features six degrees of freedom to sense translational movement in three perpendicular axes (surge, heave, sway) and rotational movement around three perpendicular axes (roll, pitch, yaw). Unit must be designed to provide motion, position and navigational sensing. To be used in extreme environment of Formula 1, unit must be a small and durable single device capable of sensing six degrees of freedom. By using MEMS (microelectromechanical system) technology, the unit measures the motion of the car and then delivers the data to the ECU unit using some of industry-standard communications protocols. Analyzing the data teams specialist can decide which movement has to be suppressed and in what way to improve car handling.
All of these movements are precisely measured during the testing and race. There are a special electronic units, small compact motion sensor which features six degrees of freedom to sense translational movement in three perpendicular axes (surge, heave, sway) and rotational movement around three perpendicular axes (roll, pitch, yaw). Unit must be designed to provide motion, position and navigational sensing. To be used in extreme environment of Formula 1, unit must be a small and durable single device capable of sensing six degrees of freedom. By using MEMS (microelectromechanical system) technology, the unit measures the motion of the car and then delivers the data to the ECU unit using some of industry-standard communications protocols. Analyzing the data teams specialist can decide which movement has to be suppressed and in what way to improve car handling.
Back to the top of the page




